
倒车雷达(Reverse Parking Sensor)是一种安装在汽车后部的辅助装置,主要用于帮助驾驶员在倒车时检测车辆后方的障碍物,并通过声音或可视化的提示来防止碰撞。倒车雷达通过传感器(通常是超声波或电磁传感器)来探测车辆后方的距离变化,并根据障碍物的远近发出不同的警告信号,提醒驾驶员。
倒车雷达的功能:
障碍物检测:倒车雷达能够探测车辆后方的障碍物,特别是在驾驶员的视线盲区内。
警示信号:当检测到障碍物时,系统会发出声音警告(例如蜂鸣声),声音频率会随着障碍物距离的减小而加快,最终变为连续的长音,提示驾驶员障碍物非常接近。
提高倒车安全性:通过帮助驾驶员识别看不见的障碍物,倒车雷达能够显著降低车辆倒车时发生碰撞的风险,特别是在狭窄空间、停车场等情况下。
应用场景:
倒车雷达广泛应用于各种乘用车和商用车,尤其是在停车、倒车时为驾驶员提供便利,减少事故发生的可能性。
倒车雷达(Reverse Parking Sensor)的工作原理是基于超声波或电磁波技术,通过探测障碍物与车辆之间的距离来帮助驾驶员安全倒车。以下是倒车雷达的详细工作原理:
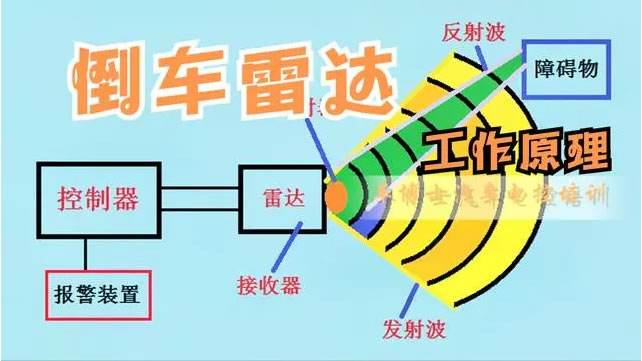
1. 传感器发射超声波
倒车雷达系统通常安装在汽车的后保险杠上,配有多个超声波传感器。当车辆挂入倒挡时,倒车雷达系统自动启动。
每个传感器定期发射超声波信号。超声波是一种人耳听不到的高频声波,适合探测近距离的物体。
2. 超声波反射
当超声波遇到车后方的障碍物(例如墙壁、行人或其他车辆)时,超声波会被反射回来。
传感器会接收这些反射回来的超声波,并通过测量发射和接收到超声波之间的时间差来计算障碍物的距离。
3. 距离计算
距离的计算基于声波的传播速度(在空气中的传播速度约为343米/秒)。倒车雷达系统通过公式计算出障碍物距离:
距离=声波传播时间×声波速度×0.5
这里乘以0.5是因为声波需要经过障碍物反射回传感器的往返时间。
4. 警告系统
当障碍物距离车辆较近时,倒车雷达会根据距离给驾驶员发出警告。这通常表现为蜂鸣声或声音提示。随着障碍物距离的减少,蜂鸣声的频率会逐渐加快,当障碍物非常接近时,蜂鸣声会变成持续的长音。
高级倒车雷达系统可能还会在中控屏幕上显示车辆与障碍物的可视化图像,帮助驾驶员判断障碍物的位置和距离。
5. 多传感器协同工作
倒车雷达系统通常有多个传感器(通常为4到8个),这些传感器会覆盖车辆后方的不同区域。通过协同工作,传感器可以准确探测障碍物的方位(如左右两侧或正后方),确保360度的安全性。
6. 传感器类型
超声波传感器:这是目前倒车雷达最常用的类型。其优点是成本相对较低,适用于大多数环境,但它对不规则物体或表面吸收声波的障碍物(如布料、草地)敏感度较低。
电磁波传感器:一些倒车雷达系统还采用电磁波传感器。电磁波传感器能够在车辆周围产生电磁场,当车辆接近金属物体时,电磁场会发生变化,系统据此判断障碍物位置。这种系统常见于一些高端车辆,但它通常对非金属物体的探测不如超声波灵敏。
7. 系统限制
倒车雷达对低矮物体(如路沿、低矮的障碍物)和纤细的物体(如柱子、树枝等)可能不敏感。
超声波传感器的性能可能会受天气影响,如下雨、积雪、泥土等可能干扰超声波的传播或反射。
倒车雷达通过发射和接收超声波(或电磁波)来测量车辆与障碍物的距离,帮助驾驶员在倒车时避免碰撞。其核心是利用声波传播时间来计算距离,并通过声光报警系统提醒驾驶员。

