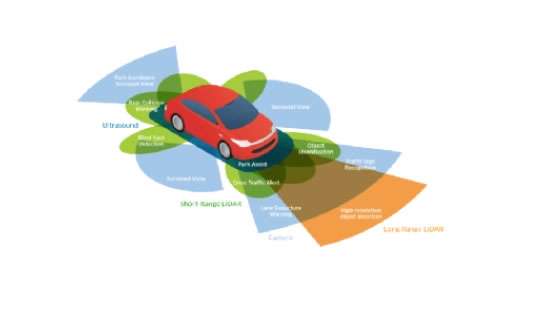
多传感器融合方案在自动驾驶汽车中是一种常见的方法,它结合了多种传感器,如摄像头、雷达、激光雷达等,以提供更全面的环境感知。
优点:
1. 互补性:不同传感器在不同条件下有不同的优势和局限性。通过融合多种传感器,可以在各种环境和条件下获得更全面和准确的数据。
2. 冗余性:如果一个传感器失效或受到干扰,其他传感器可以提供备份,增加了系统的可靠性和鲁棒性。
3. 提高精度:通过融合不同传感器的数据,可以相互验证和补充,从而提高对环境的感知精度。
4. 增强决策能力:多传感器融合提供了更丰富的数据集,有助于自动驾驶系统做出更明智的决策。
5. 适应性强:这种方案能够适应不同的驾驶环境和场景,如城市交通、高速公路、恶劣天气等。
缺点:
1. 成本:集成多种传感器会增加车辆的制造成本,这可能会影响到自动驾驶汽车的普及。
2. 复杂性:多传感器融合需要复杂的算法来处理和整合不同传感器的数据,这增加了系统的复杂性。
3. 数据处理:融合来自多个源的大量数据需要强大的计算能力,这可能会对车载计算平台提出更高的要求。
4. 校准和维护:多种传感器需要精确校准,以确保数据的一致性。同时,这也增加了维护的难度和成本。
5. 传感器间干扰:不同传感器可能会相互干扰,例如,雷达和激光雷达可能会互相影响,需要精心设计以避免这些问题。

